 DJI Enterprise Dealer
DJI Enterprise Dealer
The Professional's Source for Drones
Sign In or Create Account 丨 1.888.557.6791
X-Droners
认证商家
DJI Enterprise Dealer
X-Droners
认证商家
ZT-21V是四旋翼固定翼混合布局锂电池动力无人机,最大起飞重量为 21kg±5% ;固定翼部分采用大展弦比上单翼、倒V形尾翼、双尾撑、后置螺旋 桨的布局;四旋翼部分与固定翼部分的双尾撑相结合。该无人机同时具备四旋翼 飞行器垂直起降能力和固定翼飞行器快速巡航的能力,具备广阔的应用前景。
该型无人机具有以下优势:
*兼顾垂直起降和高速巡航:采用多旋翼和固定翼相结合的混合布局方案,使 无人 机同时具备了垂直起降和高速度、长时间巡航的能力,能在山区、丘 陵、丛林等复杂地形和建筑物密集的区域自主起降,极大扩展了无人机应用 范围;
*载荷大:得益于出色的结构设计和先进复合材料结构,结构重量低,ZT-21V 最大可用有效任务载荷重量可达5kg;
*航时长:采用大展弦比机翼、高升力翼型、低风阻机身等高效气动设计,使得整机升阻比超过10,结合高能量密度电池,使得最大航时在同级别、同类型无人机中处于先进水平;
*携带体积小:一架无人机、一组备用电池、一台充电器和一台充电器直流电 源、一个备用零件包都可以放入一个1.25mx0.4mx0.55m的运输箱内; 无工具快装快卸。全机所有连接均设有快速锁定机构,无需任何工具,徒手 可快速完成整机装配,机械连接完成的同时自动完成电气连接。从开箱到起 飞可在2.5分钟内完成。运输箱内设有安装台,组装后飞机直接从运输箱内 起飞;
*模块化设计:机身、机翼等大部件可快速更换,适应不同能源、动力和任务 载荷,执行不同任务;
*维护性好:锂电池动力构型维护时只需要为一块电池组充电,且电池组与机 身采用快装快卸机构,更换电池可以20秒内完成,可2分钟内再次起飞执 行任务。


ZT-21V混合布局无人机多种载荷搭载
1ZT-21V锂电池动力构型混合布局无人机性能参数
序号 | 性能指标 | 参数 |
1 | 起降方式 | 全自主定点垂直起降 |
2 | 抗风等级 | 6级 |
3 | 外形尺寸(长X宽X高) | 1.9mx3.3mx0.4m |
4 | 最大起飞重量(1000米海拔) | 21kg±5% |
5 | 最大起飞重量(4500米海拔) | 19kg±5% |
6 | 有效载荷 | 0.5-5kg |
7 | 飞行速度范围 | 70Km-120Km/h |
8 | 固定翼飞行模式实用升限 | 6000m |
9 | 巡航速度(1000米海拔) | 75-90Km/h |
10 | 续航时间(最大) | 2.5h |
11 | 控制方式 | 全程自主控制 |
12 | 从开箱到组装完毕时间 | 2.5min |
13 | 电池组更换时间/再起飞时间 | 20s/2min |
14 | 运输箱尺寸(长x宽X高) | 1.25m x0.4m x0.55m |
ZT-21V四旋翼固定翼复合布局无人机航电系统方案
*航电高度集成化,四合一模块,体积小,重量轻无电磁兼容问题
四合一模块集成了三余度飞控、差分定位模块、100km图数一 体化数据链、AI人工智能模块,总体积为147mm x 114mm x 33mm, 总重量仅有335g,同时原模块间通信走线都在PCB板内部,彻底 解决了电磁兼容性问题。
采用三余度飞控,多个传感器互相独立工作,互为备份稳定可靠
专为复合翼无人机打造的三冗余度自动驾驶仪,采用三个高性能传感器,三个传感器独立工作,飞控收到各传感器的测量数据 后,进行判断、筛选和融合。
差分双天线定向,强磁场干扰的环境下,仍可以保持正确航向
双天线差分定向是利用无人机机载端的高精度GNSS接收机, 能接收地面端基准站上传的载波相位观测量实时联合解算,求得 地面端基准站和天空端流动站基线。双天线差分流动站由天线和 流动站两部分组成,天线是用来接收卫星信号的设备,天线收到 的GNSS信号通过射频馈线给到流动站。流动站根据接收到的GNSS 信息进行定位,同时使用收到的来自基准站的修正数据进行误差 改正,获得精确的定位结果。使用两个天线计算无人机航向从而 时刻给无人机提供无人机航向信息。

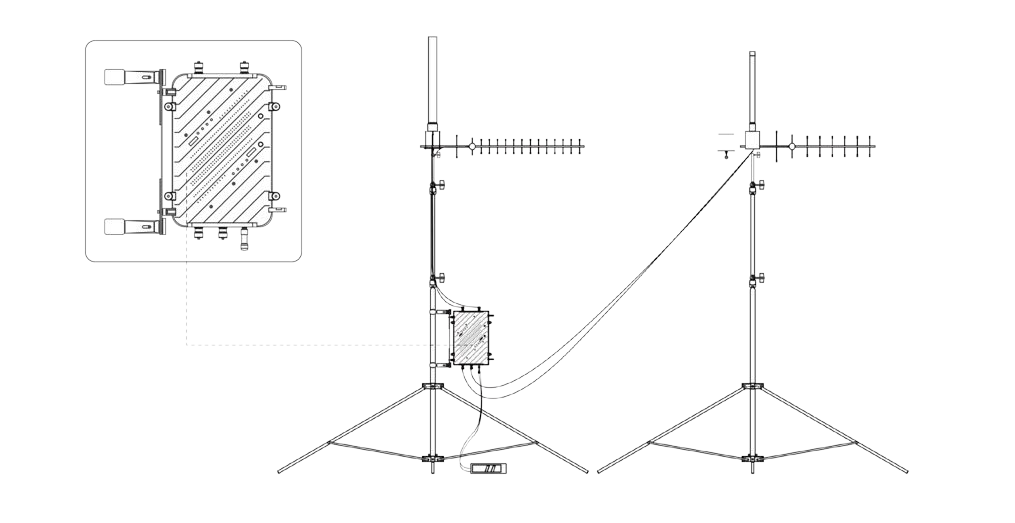
跳频抗干扰数据链,支持有楼或山遮挡环境下的中继传输100km
图像下行链路采用的频段为1430MHz〜1444MHz,数据上行链 路采用的频段为:840.5MHz〜845MHz,符合工信部规定。无人机 可确保100km的上下行数据链路传输稳定:
产品使用数据链中继技术,在有遮挡(如高楼、山)的情况下,可将数据链中继端放置在高点,解决遮挡问题,真正实现在实战 中100km传输。产品采用了当前最新通信技术中的0FDM技术有 效提升了带宽的利用效率。产品支持通过选频和跳频技术规避干 扰,并通过重传控制ARQ抵抗误码,采用双天线收发,通过天线 分集提高系统可靠性。
采用H.265和0FDM技术,实时传输1080P高清视频,质量高,延时低
使用新一代的H.265编码,其压缩率在100倍以上,传输相同 大小的1080P分辨率视频所需的无线通信带宽也大大降低,在较 低带宽的情况下,仍能够保证视频质量,结合OFDM及跳频技术, 能够实现远到100Km的1080P视频实时回传,端到端(含编解码) 延时小于300ms。
专为固定翼设计的三轴机械增稳吊舱,30倍变焦画面稳定无像旋无黑边


专为固定翼设计的三轴吊舱,球形和45度设计有效降低风 阻,三轴增稳有效解决两轴吊舱上的像旋问题,优秀的算法和结 构设计,高速巡航模式下增稳精度可达0.01度。

300米高度拍摄画面兼具“全局视野”和“丰富细节”
吊舱可引导飞机改变轨迹跟飞动目标,跟飞操作简单方便
吊舱可反馈自身的姿态信息、目标位置信息给飞控,用户可
以通过控制吊舱图像改变飞机的飞行轨迹,跟飞操作简单。

机载AI,智能识别人、车等特定目标,支持多个目标的智能识 别

基于无人机影像的智能分析系统结构如上图所示。无人机实 时影像从吊舱直接输入到机载端,不需要返回服务器处理,直接 在机载端实时进行处理和分析,完成识别特定目标的检测,并将 识别统计的结果直接叠加到视频上,发回上级指挥中心,进行进 一步确认与记录。
*支持实时统计识别目标数量,生成目标密度热力图,并支持扩展数据集识别
系统采用deep learning卷积神经网络技术,对视频图像提取 特征,并判断相应目标类别。同时采用了多线程的处理方法,最 大化合理分配机载端运算资源,将图像预处理的工作分配到多个 线程当中,缩短视频图像单帧进入神经网络的准备(预处理)时 间,从而提高整体识别系统对视频流的处理效率,该套系统的核 心优势在于并发的多线程处理机制,提高了的系统对无人机视频 流的处理效率,实现了针对小目标的快速实时的检测效果,为执 法人员提供做流畅清楚的识别结果。

基于深度学习智能识别不同种类目标,识别准确度高,克服不同 自然天气状况。采用的人工神经网络模型,在提高准确率的同时,降 低运算量,达到实时区分不同类别,并使用不同的框颜色予以区分。 支持多线程,充分利用机载计算机多核运算性能,将运算密集型,与 交互密集型的任务有机结合,合理分配不同识别任务之间的协同动作, 以达到对视频中同一画面的内容进行多角度同时识别的效果。
飞行控制自驾仪是专为小型电动复合翼无人机打造的一款三冗余度自动驾 驶仪,采用高性能传感器,历经严苛温度、气压、环境应力等条件检验,稳定 可靠;融合L1非线性与总能量控制算法,支持扩展RTK厘米级定位精度。
项目 | 参数描述 | 项目 | 参数描述 |
陀螺仪量程 | ±2000dps | GPS定位精度 | <0.5m |
加速度量程 | ±16g | GPS更新频率 | 10Hz |
静压传感器 | 120kPa | 差分GPS定位 精度 | <2cm |
数据存储 | 4GB | 高度分辨率 | <0.1m |
可选外接IMU | 支持 | 航拍POS数据 | 10k |
扩展&接口 | 支持转速采集;支持温度采集;支持CAN总线;PWM接口: 10路 输出2路采集;模拟信号:4路12bit(支持扩展);S-BUS总线:1 路输入1路输出;串口: 3路; | ||
运行条件 | 电压:6~26V/功耗<10w=;环境温度:—20°C~70°C/存储温度:— 40°C〜85°C; | ||
地面站系统 | Microsoft Windows 7 32/64 bits; Microsoft Windows 8 32/64 bits; Microsoft Windows 10 32/64 bits; | ||
重量 | 飞行控制导航模块:99g; GPS模块:41g; | ||
尺寸 | 飞行控制导航模块:88*79*23mm; GPS模块:55mm(直径)*13mm | ||
四合一航电之数据链(中继-地面接收端)参数配置及介绍:
数据链(中继-地面接收端)是一款超视距、低延时多合一高清图像传输一体机,采用OFDM载波技术,无人机专用频段1.4GHz,最高可将1080P/30的高清图像实时回传30km,空口时延达到45ms,支持图像链路、数控链路、差分GPS校正链路、S-BUS链路等,多路合一,具有体积小、重量轻、高度集成的优点。
工作频段 | 1330〜1390MHz | 有效全向功率 | 500mW |
最远通信距离 | 30.km | 波特率 | 1 15200 |
视频输入规格 | 1080P@30 720P@30 | 天线增益 | 5dBi |
天线接口 | SMA | 视频输出接口 | 内部连接 |
数据链路接口 | RS232*3, S_BUS | 工作电压 | 8〜12V |
工作功耗 | <12W | 重量 | 245g |
尺寸 | 131x63x27.5mm | 工作环境温度 | -20%~55% |
空口时延 | 45ms | 传输载波技术 | OFDM |
四合一航电之RTK高精度定位模块参数配置及介绍:
四合一航电ZTRTK高精度定位模块包含RTK和PPK功能,RTK实时输出厘米级精度的定位信息、以及高精度的航向和速度信息,适合高精度定位要求的应用场景;PPK可记录卫星原始定位数据,并可以存EVENT事件信息,用于后处理获取高精度定位信息。
项目 | 参数描述 | 项目 | 参数描述 |
工作频点 | GPS:L1,L2 ; GLONASS:G1,G2 ; BD:B1,B2 | 测速精度 (RMS) | 0.02m/s |
定位精度 | 水平±1cm;垂直土2cm | 定向精度 | 0.2/D°,D为天线距离,单位 m |
输出频率 | 最高20Hz (可设置) | 功耗 | 2.5W |
电压 | 2S~6S(8~26V) | 工作温度 | -20-55% |
重量 | 126g (控制盒) | 接口 | CAN, UART, USB2.0 |
双光三轴30倍可见光+红外光吊舱负载参数配置及介绍:
此款是三轴30倍可见光变焦增稳云台,专为固定翼定制的三轴吊舱有效的解决了两轴固定翼吊舱原有的像旋问题,高速飞行模式下依然具有超高稳定性,稳定精度达到0.01度。光学30倍变焦,即使在百米的高空依然可以清晰的看清人脸和车牌。红外热成像相机,支持黑热白热多种显示色彩模式。产品具备云台一键回中/一键垂直功能,以及跟随模式和独立模式。配合跟踪识别模块,可以将准确识别出视频中的车和人,并可以自主选择跟踪。
重量 | 630g | 直径 | 110mm |
工作电压 | 22V〜26V | 高度 | 160mm |
工作环境温度 | -20°C 〜55°C | 功耗 | 6W |
类型 | 三轴机械增稳 | 内置存储 | 16GB |
航向角度 | 360°x N | 俯仰角度 | + 45° 〜—135。 |
可见光相机变焦 | 30倍光学变焦 | 稳定精度 | 0.01° |
可见光CMOS | 星光级传感器 | 可见光焦距 | 4.3mm 至 129mm |
可见光FOV | 63.7°~2.3° | 可见光视频分辨率 | 1080P (30fps) |
红外像素 | 640*512 8-14um | 红外类型 | 非制冷氧化钒焦平 面 |
红外镜头FOV | 17° | 镜头焦距 | 35mm |
视频接口 | SDI/AV | 数据接口 | CAN/RS232/S—BUS |
识别跟踪功能 | 采用人工智能智能识别人和车,并实现实时跟踪。 | ||
地面触摸操控台:
多功能地面触摸控制器是基于ZT3014S多合一高清图传一体机研发的一款 集图像、飞行地图和吊舱控制器于一体的高度集成触屏控制器,通过简单触控操 作即可实现对移动目标的锁定和智能跟随,使用无线通讯方式,免除了线材对操 控人员的束缚;具有智能、便携、操作简单等优点,同时内置了 4G视频转播功 能,可以将视频通过4G信号接入到云端。

接入方式 | 无线连接 | 电池 | 内置电池 |
屏幕 | 8寸触控屏 | 续航时间 | 内置电池3小时, 可外部供电 |
特色功能 | 单点触控锁定目标,智能跟随 | ||
集成了 4G功能,可以在云端直播无人机实时视频画面 | |||

